The Sembang AIoT Live Team members

Transforming the “Sembang AIoT” Live sessions into a weekly occurrence is a challenging endeavor. In addition to our daily responsibilities, extensive preparations are undertaken behind the scenes, particularly for live demonstrations. Nevertheless, we commend the team for successfully orchestrating the 26th live session once again this Friday evening. Our heartfelt gratitude extends to everyone involved, with a special appreciation for our dedicated audience. We sincerely hope that the live sessions prove both beneficial and enjoyable for our viewers.

Demonstration on the AMR continued with some limitation especially on the battery power. It is a entry level of prototyping of AMR but it is powered by the lower powered high performance Axiomtek embedded board and later on the ruggesdized Axiomtek AMR controller.
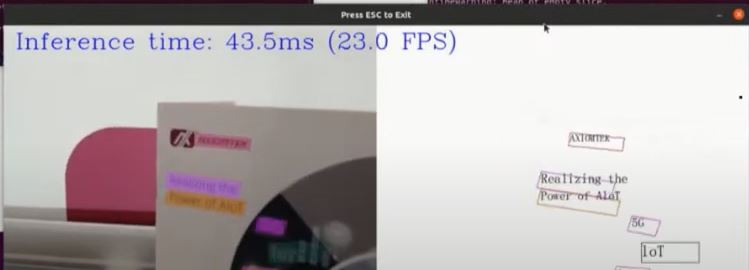
Discover the Potential of AIoT as interpreted by the AI engine operating on the AMR controller. Please note that it is built on the ROS2 platform and utilizes the Intel 11th Gen Axiomtek CAPA55R core i5 exclusively. We regret any audio disturbances experienced during this live session but trust that the video remains crisp. Join us to witness the live demo firsthand.
AMR (Autonomous Mobile Robot) systems that use ROS (Robot Operating System) can be implemented with either ROS 1 or ROS 2. Here are some key differences between ROS 1 and ROS 2:
Communication Middleware:
ROS 1: Uses the middleware called “ROS Middleware” or “roscpp.”
ROS 2: Adopts Data Distribution Service (DDS) as the default middleware, providing a more flexible and efficient communication infrastructure.
Real-Time Capability:
ROS 1: Primarily designed for non-real-time systems.
ROS 2: Offers better support for real-time systems, making it more suitable for applications with strict timing requirements.
Language Support:
ROS 1: Primarily supports C++ and has limited support for Python.
ROS 2: Provides better support for both C++ and Python, and it is designed to be more language-agnostic, making it easier to integrate with other languages.
Security:
ROS 1: Originally developed without a strong focus on security.
ROS 2: Incorporates improved security features, including the ability to encrypt communication between nodes, making it more suitable for applications with security requirements.
Node System:
ROS 1: Uses a master-slave architecture for communication between nodes.
ROS 2: Introduces a decentralized architecture, eliminating the need for a central master. This makes the system more robust and scalable.
Ecosystem and Community:
ROS 1: Has a mature and extensive ecosystem with a large community and numerous packages.
ROS 2: Is gradually growing, and while it may not have as many packages as ROS 1, it is gaining momentum, and many developers are migrating to ROS 2 for its enhanced features.
Quality of Service (QoS):
ROS 1: Limited QoS options.
ROS 2: Offers more sophisticated QoS settings, allowing users to fine-tune the communication parameters to meet the requirements of specific applications.
When choosing between ROS 1 and ROS 2 for an AMR system, consider factors such as real-time requirements, security, language support, and the specific features needed for your application. The decision may also depend on the existing ecosystem and community support for your chosen ROS version.
AIoTmission is currently supporting 2 main stream of ROS development:-
Axiomtek AMR Builder Support package (BSP)
Intel solutions covers a more generic AMR development applications while Axiomtek AMR BSP builder support package covers high-accuracy industrial applications with strong support of published compatible sensor list, techniques of choosing the right motor or sensors, mechanical design support and AMR Digihub software support. You can find out more from this button below:-
